INTRODUCTION
TO SOFTSTARTER
|
|
Contents
Squirrel
cage motors
Voltage
NEMA Design
Voltage
Power
factor
Efficiency
Speed
Torque
Direct-on-line
start (D.O.L)
Star-delta
start
Frequency
converter
Softstarter
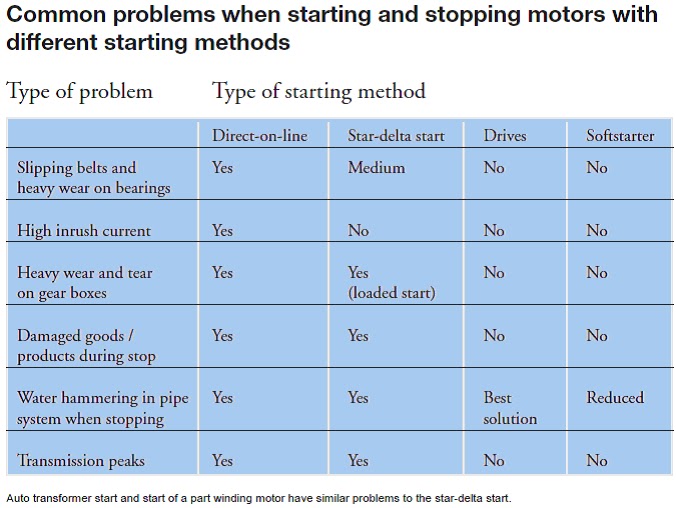
Common problem when starting and stopping motors
Centrifugal fan
Direct-on-line
start (D.O.L)
Star-delta
start
Softstarter
Selection
of a suitable Softstarter
Centrifugal pump
Direct-on-line
start (D.O.L)
Star-delta start
Softstarter
Selection of a suitable
Softstarter
Compressor
Direct-on-line
start (D.O.L)
Star-delta
start
Softstarter
Selection
of a suitable Softstarter
Conveyor belt
Direct-on-line
start (D.O.L)
Star-delta
start
Softstarter
Selection
of a suitable Softstarter
Start
ramp
Stop
ramp
Initial
voltage
Current
limit
Step
down voltage
Adjustable
rated motor current
Parallel
start of motors
Sequential
start of motors
In-Line
connection
Inside
Delta connection
Location
of the main contactor
General About Motors
Modern electrical motors are available in many different
forms, such as single phase motors, three-phase motors, brake motors,
synchronous motors, asynchronous motors, special customized motors, two speed
motors, three speed motors, and so on, all with their own performance and
characteristics.
For each type of motor there are many different mounting
arrangements, for example foot
mounting, flange mounting or combined foot and flange mounting. The
cooling method can also differ very much, from the simplest motor with free
self-circulation of air to a more complex motor with totally enclosed air-water
cooling with an interchangeable cassette type of cooler.
Note
that we will focus on asynchronous motors only.
|
Squirrel cage motors
The focus has been
placed on the squirrel cage motor, the most common type of motor on the market.
It is relatively cheap and the maintenance cost is normally low.
Voltage
q Always
refer to motor’s nameplate for termination.
q For
example, use delta connection for 50Hz/380~400 supply volt.
NEMA Design
Three-phase AC motors are classified by NEMA as NEMA A,
B, C and D. NEMA specifies certain operating characteristics for motors when
started by applying rated voltage and frequency (across the line starting). A
NEMA B motor, for example, typically requires 600% starting current and 150%
starting torque.
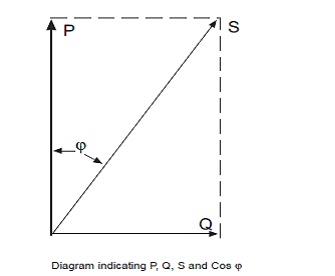
Power factor
q
Ratio between the
active power (kW) and the reactive power (kVA)
q
Designated as the cos j.
q
Normal power factor
value is between 0.7 and 0.9,
q
Small motors have lower
value and large ones have higher value
Efficiency
q Expressed as a percentage.
q Indication of how much input electrical energy is
converted to output mechanical energy.
Speed
Speed
depends:
I. Number of poles of the stator winding
II. Main frequency.
To
calculate the speed of a motor the following formula can be used:
n = 2 x f x 60
p
n = synchronous speed
f = net frequency
p = number of pole
Example: 4-pole motor running at 50 Hz
n = 2 x 50 x 60 =
1500 rpm
4
This
speed is the synchronous speed and a squirrel-cage or a slip-ring motor can
never reach it. At unloaded condition the speed will be very close to
synchronous speed and will then drop when the motor is loaded.
The difference between the
synchronous and asynchronous speed also named rated speed is ”the slip” and it
is possible to calculate this by using the following formula:
s = n1 - n
n1
s = slip (a normal value is between 1 and 3 %)
n1 = synchronous speed
n = asynchronous speed (rated
speed)
Torque
q Torque is a twisting or turning force that tends to
cause an object to rotate.
q Starting torque for a motor
differs significantly depending on the size of the motor.
q A small motor, e.g. ≤ 30 kW,
normally has a value of between 2.5 and 3 times the rated torque
q A medium size motor, say up
to 250 kW, a typical value is between 2 to 2.5 times the rated torque.
q Really big motors have a
tendency to have a very low starting torque, sometimes even lower than the
rated torque. It is not possible to start such a motor fully loaded not even at
D.O.L start.
The rated torque of a motor can be calculated using the following
formula:
Mr = 9550 x Pr
Nr
Mr = Rated torque (Nm)
Pr = Rated motor power (kW)
nr
= Rated motor speed (rpm)
Different starting methods
Direct-on-line
start (D.O.L)
q The most common starting method available on the
market.
q The disadvantage is it gives the highest possible
starting current.
q The starting current normal value is between 6 to 7
times the rated motor current but values of up to 9 or 10 times the rated
current exist.
q The starting torque is also very high, and is higher than
necessary for most applications.
q The torque is the same as the force, and an unnecessary high force
gives unnecessary high stresses on couplings and the driven application.
Star-delta
start
q
The starting
current is about 30 % of the starting current during direct on line start
q
The starting torque is reduced to about 25 %
of the torque available at a D.O.L start.
q
This starting
method only works when the application is light loaded during the start.
q
If the motor is too heavily loaded, there will not be
enough torque to accelerate the motor up to speed before switching over to the
delta position.
q
Applications with a load torque higher than 50 % of the
motor rated torque will not be able to start using the start-delta starter.
Frequency converter
q By controlling the
frequency, the rated motor torque is available at a low speed
q The starting current is low,
between 0.5 and 1.0 times the rated motor current, maximum 1.5 x In.
q Another available feature is
softstop, which is very useful, for example when stopping pumps where the
problem is water hammering in the pipe systems at direct stop.
q The softstop function is
also useful when stopping conveyor belts from transporting fragile material
that can be damaged when the belts stop too quickly. It is very common to
install a filter together with the drive in order to reduce the levels of
emission and harmonics generated.
Softstarter
q It has thyristors in the
main circuit, and the motor voltage is regulated with a printed circuit board.
q The softstarter makes use of
the fact that when the motor voltage is low during start, the starting current
and starting torque is also low. During the first part of the start the voltage
to the motor is so low that it is only able to adjust the play between the gear
wheels or stretching driving belts or chains etc. In other words, eliminating
unnecessary jerks during the start. Gradually, the voltage and the torque
increase so that the machinery starts to accelerate.
q One of the benefits with
this starting method is the possibility to adjust the torque to the exact need,
whether the application is loaded or not.
q The softstop function can
also be used when stopping conveyor belts to prevent material from damage when
the belts stop too quickly.
Different applications
All
motors are used for starting and running different applications. The different
applications will also result in different load conditions for the motor.
There are two factors to
consider:
1.
Braking load torque, a direct braking force on the motor shaft. To be able to
accelerate, the motor has to be stronger than the load. The accelerating torque
is the difference between the available motor torque and the load toque.
Accelerating torque = Available motor torque – load torque
2. Involved
moment of inertia or flywheel mass will also affect the start. The bigger
inertia the longer starting time for
the same motor.
CENTRIFUGAL FAN
For
some applications the motor is started with reduced load torque, i.e. unloaded
start. Big centrifugal fans are often started with a closed damper and this
will make the start easier (shorter) but since the moment of inertia is still
present the starting time might be
quite long anyway.
Direct-on-line start
q
Centrifugal fans are very often driven by one or more
drive belts.
q
During a D.O.L start these belts have a tendency to
slip because the starting torque from
the motor is too high during the start sequence and the belts are not able to
transfer these forces.
Star-delta
starter (Y-D)
q Lower starting torque but
depending on the fact that the load torque increases with the square of the
speed,
q The motor torque will not be
high enough in the star position to accelerate the fan to the rated speed.
q
When switching over to delta
position it will be both a high transmission and current peak, often equal to
values when making a D.O.L startor even higher, with a slipping belt as a
result.
Softstarter
q
The key to
solve these problems is to reduce the starting torque from the motor during
start.
q
By using an
softstarter the voltage is decreased to a low value at the beginning of the
start, low enough to avoid slip but high enough to start up the fan.
q
The softstarter
provides the ability to adjust to fit any starting condition, both unloaded and
fully loaded starts.
Selection of a suitable softstarter for centrifugal fan
Normal start
For
fans with small or medium large flywheels, select a softstarter according to
the rated motor power. The above is valid if the time for D.O.L start is less
than 5 seconds.
Heavy duty start
For
fans with large flywheels, select a softstarter designed for heavy duty start
according to the rated motor power. It is also possible to select a softstarter
for normal start, select a unit with one size bigger power rating than the
motor and use an overload relay class 30.
The
above is valid if the time for D.O.L start is more than 5 seconds.
CENTRIFUGAL
PUMP
There
are a lot of different types of pumps; like piston pumps, centrifugal pumps,
screw pumps etc. But the most common version is the centrifugal pump and we
have selected this one to describe.
Direct-on-line start
q
Wear and tear
depending on pressure waves in the pipe system created when the motor starts
and stops too quickly.
q
During a D.O.L
start the motor gives much too high starting torque with the result that the
motor accelerates and reaches nominal speed too quickly. The reason is that the
braking load torque is low for a pump during start.
Star-delta starter (Y-D)
q It is possible to reduce the
starting torque but the motor torque in the star position is too weak to be
able to complete the start and reach the rated speed.
q When the motor reaches
approx. 80-85 % of the rated speed and the switch over to the delta position
will give both high transmission and current peaks with pressure waves as a
result.
q When stopping a pump, it is also normal to have problems. When making a
direct stop by disconnecting the main supply the motor stops too quickly.
Depending on high mass flow in the pipe system the water will continue with the
same speed for a short period and then come back again, backwards in the pipe
system. This creates high pressure shocks on valves and gives high mechanical
stresses on the pipe system.
Softstarter
q
By using an softstarter the voltage is reduced during
the start sequence with the result that the motor torque is reduced. During the
start sequence the softstarter increases
the voltage so that the motor will be strong enough to accelerate the pump to
the nominal speed without any torque or current peaks.
q
During the stop
sequence the softstarter reduces the voltage via a voltage ramp and the motor
becomes weaker and weaker. Because of this the water speed slows down very
smoothly without creating any pressure waves.
Selection
of a suitable softstarter for centrifugal pump
Normal start
Starting a pump is a typical
normal start condition.
Select a softstarter
according to the rated
motor power.
Heavy duty start
Not applicable for this
application.
COMPRESSOR
Smaller compressors are often of piston type and the load torque increases
linearly with the speed. Screw compressors are often used when there is a
bigger need for air flow and this type
has a load torque increasing with the square of the speed.
Direct-on-line
start (D.O.L)
q
Compressors
started direct-on-line are exposed to high mechanical stresses on the
compressor itself, but also on drive belts and couplings. The result is
shortened endurance. In cases where the drive belts are used the belts very
often slip during start.
q
The
high starting torque received during starting with this method is the source of
the problems. The starting current is always high at D.O.L start. A normal
value can be approx. 7 times rated motor current.
Star-delta starter (Y-D)
q
Star-delta
start gives a lower starting torque and starting current but the motor is too
weak during the start up to be able to accelerate the motor up to nominal
speed. When switching to the delta position both current and torque peaks will
occur with high mechanical stresses as a result.
q
Compressors
are very often running at no load condition for longer periods when the
pressure in the system is high. A motor running under these circumstances
always has a poor power factor and low efficiency. Some times the value is so
low that it must be compensated.
Softstarter
q
By
using an softstarter it is possible to limit the starting torque to a level
suitable for all different applications. The result is less stress on
couplings, bearings and no slipping belts during start. The maintenance cost
will be reduced to a minimum.
q
When
using a softstarter the starting current received is approx. 3 to 4 times the
rated motor current.
Selection of a suitable softstarter
Normal start
For
compressors with D.O.L starting time less than 5 seconds, select a softstarter
according to the rated motor power.
Heavy duty start
For
compressors with D.O.L starting time more than 5 seconds, select a softstarter
designed for heavy duty start according to the rated motor power. It is also
possible to select a softstarter for normal start, select a unit with one size
bigger power rating than the motor and use an overload relay class 30.
CONVEYOR
BELT
It is a typical constant torque load with low
to high braking torque depending on how heavy it is loaded.
Direct-on-line
start (D.O.L)
q
Conveyor belts
often need a starting torque very near or just above the rated torque of the
motor.
q
A direct-on-line start with a normal squirrel cage
motor gives approx. 1.5 to 2.5 times rated torque of the motor depending on
motor size, type etc.
q
When making a direct-on-line start there is a very high
risk of slipping between the belt and the driving role depending on this high
starting torque. Gearboxes and couplings are also exposed to
high mechanical stresses. This result is considerable wear and tear and often
high maintenance costs. Sometimes fluid
couplings are used to reduce the transferred torque. This method is expensive
and requires a lot of maintenance.
Star-delta start
q It is not possible to use this starting method when
the load torque is close to the rated motor torque.
Softstarter
q By using an softstarter the
starting torque can be reduced to a minimum value still able to start up the
conveyor belt. The setting possibility of the softstarter makes it possible to
adjust the torque to exactly the level that is necessary for the start. The
result is the least possible stress on gearboxes and couplings and no slipping
belts during start. This will reduce the maintenance cost to a minimum. When
using a softstarter you will receive approx. 3 to 4 times rated motor current
during start.
Selection of a suitable softstarter for conveyor belt
Normal
start
A start of short and light loaded conveyor belt is a
typical normal start. For conveyors with D.O.L starting time less than 5 seconds, select a softstarter according
to the rated motor power.
Heavy duty start
Conveyor
belts can in some cases be very long and if the belt is fully loaded during
start the starting time can be very long. For such applications select a
softstarter designed for heavy duty start. It is also possible to select a
softstarter for normal start if the softstarter is chosen one size larger than the rated motor power and
use an overload relay class 30.
How to select a softstarter for
different applications
Selecting
Schneider’s Alistart 01 softstarter for 4KW,400V,3phase
Note
that control voltage must be specified for some other brand of softstarter.
|
Description of the softstarters
Printed circuit board is
used to control the firing of the thyristors based on the current and voltage
references, and also for the calculation of different values, for example the
power factor, active power, etc. It can also be used for storing historical
data, the event log, indicating trends and much more.
Heat sink is used to get rid of the
heat in the softstarter generated by the current during the start and the
continuous run. The capacity of the heat sink very much reflects the starting
capacity and the operational current of the softstarter.

Fans are used to increase the cooling capacity of the heat sink.
Some smaller softstarters don’t have fans at all.
Housing can be made of plastic
material, metal or a combination of these, and its function is to protect the
inside components from mechanical and electrical damage. For total outside
protection from dust and dirt a separate enclosure is often required since the
degree of protection (IP class) of the unit itself is too low.
Thyristors are semi-conducting
components connected in an anti-parallel fasion and placed in two or three
phases of the main circuit. They regulate (by increasing or decreasing) the
level of voltage during start and the stop ramp, as described in the picture
below. During a continuous run the thyristors are conducting fully.
Start: The thyristors let part of the voltage through at the beginning and then
increase it, according to the set ramp time for the start.
Stop: The thyristors are fully conducting and when soft stopping, they
decrease the voltage according to the set ramp time for stop.
SOFTSTARTER COMMON SETTINGS
Aucom CSXi
softstart parameter setting
Aucom CSX parameter setting
Start ramp is the time from were the
softstarter start its ramp (initial voltage) until full voltage is reached. The
ramp time should not be too long, as this will only result in unnecessary
heating of the motor and a risk of the overload relay to trip. If the motor is
unloaded the start time for the motor will probably become shorter than the set
ramp time, and if the motor is heavily loaded, the start time will probably
become longer.
Stop ramp is used when a soft stopping
of the motor is required, for example a pump or a conveyor belt. The stop ramp
is the time from full voltage until stop voltage (initial voltage) is reached.
If the ramp time is set
Initial voltage. Sometimes named pedestrian
voltage or torque, this is the point from where the softstarter starts or stops
its ramps. The torque of the motor will drop with the square of the voltage and
if the voltage is set too low, for example 20 %, the starting torque will
become 0.22 = 0.04 = 4 % only, and the motor will not start from the very
beginning. Therefore it is very important to find a level that is just high
enough to make the motor take off directly to avoid unnecessary heating.
Current limit can be used in applications
where a limited starting current is required, or at a heavy-duty start when it
is difficult to achieve a perfect start with the setting of the initial voltage
and the start ramp only. When the current limit is reached, the softstarter
will temporarily stop increasing the voltage until the current drops below the
set limit, and then continues ramping up to full voltage.
Note that this feature is
not available on all softstarters.
|
Step down voltage gives a special type of stop
ramp. It is possible to adjust the voltage to drop to a level where the speed
of the motor starts to reduce immediately at the stop command. For low loaded
motors the speed will not reduce until a very low voltage is reached, but using
the step down voltage function can eliminate this phenomenon and is especially
useful for stopping pumps.
Adjustable rated motor
current makes
it possible to set the motor rated current on the softstarter for the used
motor. This setting may affect other values as well, such as the trip level of
the electronic overload relay, the level of the current limit function and so
on.
Derating when used above Ambient
temperature
Above
ambient temperature recommended by manufacture, the following formula can
generally be used to calculate the operational current:
Ie derated = Ie - (Δ T x Ie x 0.008)
Ie derated = maximum operational current after derating
Ie = rated current of the softstarter
Δ T = temperature difference
0.008 = derating factor
Derating when used at high altitudes
% of Ie = 100 -
x - z
150
x = actual altitude for the softstarter
z = manufacture’s recommended
altitude
Start of several motors
Parallel start of motors
There
are two important parameters to check:
1.
The softstarter must be able to cope with the rated current for all motors
together.
2.
The softstarter must be able to cope with the starting current for all motors
together until rated speed is achieved.
Note! If a by-pass contactor is used for the
softstarter, only point 2 above has
to be
taken into consideration.
|
Example:
Start
of two motors with Ie = 100 A and
relative
starting current 4 x Ie.
Starting
time is 10 seconds.
Total
starting current is 100 x 4 x 2 = 800 A
over 10 seconds.
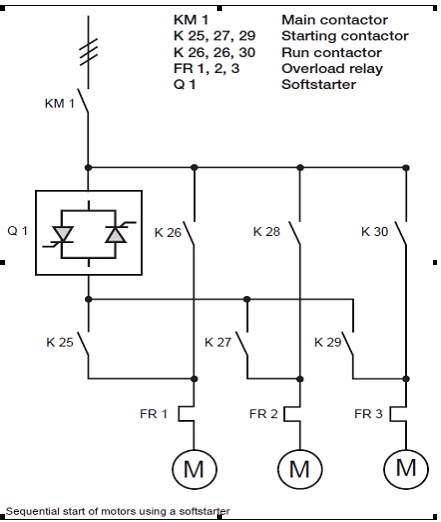
Sequential
start of motors
Example:
Start of three
motors with Ie=100 A and relative starting current 4 x Ie.
Starting
time for the motors is:
Motor
1 = 5 seconds
Motor
2 = 10 seconds
Motor
3 = 8 seconds
The
starting current for the motors is 100 x 4 = 400 A and the total starting time
is 5 + 10 + 8 = 23 seconds.
Note! It is not possible to add the starting time for each motor if
the rated current is different from one motor to another. A separate
calculation has to be made for those applications.
|
Different ways of connecting the
Softstarter
In-line connection
q The most common way to
connect the softstarter. The selected devices for Inline connection must be
chosen to cope with the rated motor current.
Example: 100 A motor requires a 100 A
softstarter, 100 A main contactor etc.
Inside Delta connection
q The Inside Delta connection
makes it possible to place the softstarter in the delta circuit and in that way
it can easily replace an existing Y/D-starter. When the softstarter is Inside
Delta it will only be exposed to 58 % (1/√3) of the In-line current. Therefore
it is possible to downsize the devices in order to achieve a more
cost-effective solution.
Example: A 100 A motor requires a 58 A softstarter, a 58 A main contactor if
placed in the delta
circuit, etc.
q Note that only a few types
of softstarters can actually be connected Inside Delta.
Location of the main contactor
q When using the softstarter
Inside Delta there are two options for the main contactor: in the delta circuit
or outside. Both locations will stop the motor but in alternative A, the motor
is still considered to be under tension.
q In alternative B the main
contactor must be chosen according to the rated current of the motor, while the
contactor in alternative A can be chosen according to 58 % (1/√3) of the rated
current.
Basic settings for
different
Applications
Note ! All settings below are only proposals and may change from one
application
to another and therefore need to be checked individually.
|
Frequently asked questions (FAQ)
Main contactor
Q Is
there any requirement to put a main contactor in series before the softstarter?
A The
softstarter does not require any main contactor but we recommend the use of one
for emergency stop and/or trip of the overload relay. In some applications an
MCCB can be used instead of the main contactor.
Advantages of by-pass
Q What
are the advantages of using by-pass?
A Reduction
of power loss. It is also possible to reduce the enclosure size and use a
higher IP-class since air ventilation is not required.
Test without motor
Q Can
I test a softstarter without using a motor?
A No,
this is not possible since there will be no current going through the
softstarter and some types will also indicate loss of load.
Different frequency
Q Can
I use the same softstarter at both 50 and 60 Hz?
A It is possible with all type of ABB softstarters as
long as the curve is sinusoidal.
Overload relay trips during start
Q Why
does the overload relay trip during start?
A Possible
reasons can be one of these or in a combination:
- too low current limit
- too long ramp time
- too low initial voltage
- wrong tripping class on the overload
- wrong setting on the overload
Voltage fluctuations
Q What
voltage fluctuations are allowed for the softstarters?
A The
minimum and maximum value where we can guarantee full function is -15 % to +10
% of the rated value. This is also stated in the IEC-standard.
Example:
400 V - 15 % to +10 % ≥ 340 V - 440 V range